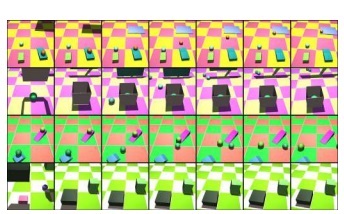
受蝠鲼生物力学的启发,研究人员开发了一种节能的软体机器人——“蝴蝶机器人”。图片来源:北卡罗来纳州立大学
据最新一期《科学进展》杂志,美国北卡罗来纳州立大学的研究人员开发出了一种节能的软体机器人,它的游泳速度比以前的游泳软体机器人快4倍以上。这些机器人被称为“蝴蝶机器人”,因为它们的游泳动作类似于人类蝶泳时手臂的动作。
研究人员表示:“到目前为止,游泳软体机器人的游泳速度还不能超过每秒一个身体长度,但海洋动物,如蝠鲼,能够游得更快、更有效率。”
受蝠鲼生物力学启发,研究人员开发了两种类型的蝴蝶机器人。其中一个是专门为速度而打造的,平均速度能达到每秒3.74个身体长度。另一个被设计成机动性很强,能够向右或向左急转弯,这种机动原型机器人速度能达到每秒1.7个身体长度。
研究人员表示,可以用“斯特劳哈尔数”评估飞行和游泳动物的能量效率。当动物在游泳或飞行时,斯特劳哈尔指数在0.2到0.4之间时,就会出现推进效率的峰值。此次,两个蝴蝶机器人的指数都在这个范围内。
蝴蝶机器人的游泳力来自它们的翅膀,它们的翅膀是“双稳态”的,这意味着翅膀有两种稳定的状态。机翼类似于卡扣式发夹。在施加一定的能量使其弯曲之前,发夹是稳定的。当能量达到临界点时,发夹就会折成不同的形状,这也是稳定的。
在蝴蝶机器人中,以发夹为灵感的双稳态翅膀附着在柔软的硅胶身体上。使用者通过将空气泵入软体内部的腔室来控制机翼两种稳定状态之间的切换。当这些腔室充气和放气时,身体会上下弯曲,迫使翅膀与其一起来回折翅。
速度更快的蝴蝶机器人只有一个“驱动单元”,它控制着两个翅膀。这使得它非常快,但很难左转或右转;而机动蝴蝶机器人基本上有两个驱动单元,它们并排连接。这种设计允许用户操纵两侧的机翼,或者只“拍打”一个机翼,这使它能够急转弯。
来源:科技日报

 上一篇
上一篇